Since Karel Capek first used the word “robot” in print in a 1920 play, a vast array of autonomous electromechanical systems have emerged from research labs, making their way onto production lines for industrial tasks, into toy stores for entertainment, and even into homes to perform simple household jobs. While the bulk of robotics research strives to make robots more useful and more capable of even greater levels of autonomy, several labs are attempting to make robotic systems much smaller. One of the most active areas of such research is medical nanorobotics, an emerging field positioned at the intersection of several sciences.
As a discipline, medical nanorobotics remains young for now, but many scientists are already demonstrating new developments they say will form the foundations for the next major breakthroughs in this area. Such breakthroughs could lead to novel applications that offer new ways of accessing small spaces in the human body that would otherwise be unreachable without invasive surgery.
“Nanorobotics can play a major role in medical applications, especially for target interventions into the human body through the vascular network,” says Sylvain Martel, director of the nanorobotics laboratory at École Polytechnique de Montréal. “In many types of interventions, medical specialists are lacking appropriate tools to do a good job, and I believe that nanorobotics could bring new methods and tools to these particular applications.”
Recent fabrication, actuation, and steering demonstrations of nanoscale robots represent the first crucial steps toward developing real-world applications for targeted drug delivery and other uses. But researchers say that with many engineering and medical challenges remaining to be met, clinically usable medical nanobots might be viable only after several more years of work in this area. “I believe that the first real application that will have a huge impact is in targeted cancer therapy, such as delivering therapeutic agents directly to the tumor through the vascular network,” says Martel.
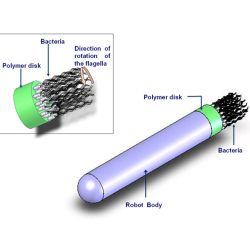
Currently, Martel and his team are focused on developing a medical application designed to target regions inaccessible to traditional catheterization techniques. The platform they created uses magnetic resonance imaging (MRI) for feeding information to a controller that is responsible for steering the nanobots along blood vessels. The nanobots, which consist of magnetic carriers and flagellated bacteria that can be controlled by computer and loaded with therapeutic and sensing agents, essentially serve as wireless robotic arms that can perform remote tasks.
“Unlike known magnetic targeting methods, the present platform allows us to reach locations deep in the human body using real-time control,” Martel says. Still, he predicts it will take three to five years before the system reaches maturity, meaning complete computer-based control of the propulsion and steering mechanisms.
Another researcher designing a similar approach to controlling nanobots is Metin Sitti, director of the nanorobotics lab at Carnegie Mellon University. Sitti and his team are working on building nanobots for drug-delivery applications. In one recent project, he and his team have used bacteria to move nanoscale robots, which use the chemical energy inside the bacteria and in the environment for propulsion. In addition to this propulsion method, Sitti and his team have experimented with optical and magnetic stimuli to coax the bacteria into decelerating, stopping, and moving again.
But as with other similar projects in this area, Sitti and his team are facing several fundamental challenges. “Such bacteria-propelled nanobots are limited by the stochastic nature of cellular motion, and by the relatively brief lifetimes of bacteria,” he says. In addition, Sitti says he and his team must develop more effective ways to communicate with nanobots once they are inside a body. “Methods must be found to program and control large numbers of nanobots,” Sitti says. “This will be necessary if such devices are to treat large areas of the body, to increase the speed and success of medical operations, and to deliver sufficient amounts of drugs to their targets.”
Scientists working in this area say the nanorobotic systems developed by Martel, Sitti, and other researchers could lead to new surgical techniques far more sophisticated and far less invasive than methods currently in use. Such techniques would rely on devices capable of entering the human body through natural orifices or very small incisions to perform diagnostic procedures or repair tissue. “The mechanisms of life operate at the nanoscale,” says Aristides Requicha, director of the laboratory for molecular robotics at the University of Southern California. “If we build devices at their scale, we will be able to interact intimately with them.”
One goal of Requicha’s work in this area is to overturn the basic paradigm of today’s medicine, and to shift from a treatment model to a prevention model through the use of in-body sensors that check for and kill pathogens before the patient has any symptoms. Essentially, Requicha’s vision entails rethinking the traditional sequence of patients demonstrating symptoms and then seeking medical care for their ills. “In the long run,” he says, “I would like to build artificial and preferably programmable cells.” In the meantime, though, one project Requicha and his team are working on is a network of wireless nanosensors capable of operating in biological environments. “This network would give us unprecedented capabilities to study cell biology by being able to acquire data in real time and for extended periods,” he says.
Near-Term Applications
While some research in this field remains theoretical and might never directly lead to real-world applications, several nanorobotics labs focus specifically on projects that might have near-term practical applications. “One aspect of entering these fields that was particularly important to me, as an engineer, was to make sure there were genuine applications on the horizon that made sense,” says Bradley Nelson, head of the institute of robotics and intelligent systems at ETH Zürich. “It rapidly became clear that applications in biological research were possible, but then it became even more clear that the potential in medicine was the real reason for pursing these fields.”
Aristides Requicha’s research aims for a preventive health model in which in-body sensors check for and kill pathogens before a patient exhibits any symptoms.
Among many projects, Nelson’s group is creating artificial flagella designed to mimic natural bacteria in both size and swimming technique and is working on nanobots for retinal surgery. The challenges he and his team face, as with other researchers working in this area, are numerous. Still, Nelson says he remains optimistic, and points to a recent spinoff called FemtoTools, in Zürich, Switzerland, that is already marketing micromanipulation products, such as force sensors and microgrippers. “With sufficient resources and energy and the backing of doctors and business people,” he says, “retinal therapies using nanobots will be possible within five years.”
With nanorobotics labs working hard to address fundamental issues in physics, biology, and computer science as they seek to create viable medical applications, at least one major challenge resides on a more social level. One of the most frequently cited difficulties of working in this field is the interdisciplinary nature of the research itself, which requires not only combining advanced science in health with advanced science in robotics, but also the ability to communicate in the language that medical professionals use.
Nelson’s group, for example, consists of roboticists, mechanical engineers, electrical engineers, software engineers, computer vision researchers, materials scientists, and chemists. And the team works directly with doctors and biologists. “Trying to understand what all these disciplines are about and how they can work together is a major challenge and, to me, one of the most stimulating aspects of this field,” Nelson says. Martel points to a similar experience. “In my office, I can talk about a new imaging algorithm on an MRI machine, and five minutes later have a conversation about microelectronic circuits, antibodies to connect nanoparticles to miniature robots, or genetics to enhance the molecular motor of flagellated bacteria,” he says.
Requicha, for his part, says interdisciplinary work is exciting but not easy. “This is an issue not only at the research level, but also educationally,” he says. “How do we prepare students to work in this field?”
In addition to the challenges associated with the interdisciplinary nature of the research, researchers cite safety issues, health concerns, and government regulation as other key issues. Swallowing or injecting miniature robots is not something many patients would readily agree to do without assurances of safety, or at least some demonstrable evidence that the potential benefits outweigh the possible risks. Because human physiology is complex, dynamic, and even different from person to person, reliably producing such evidence likely will remain an engineering challenge for years to come.
Despite the many challenges, researchers say the efforts will yield positive results in the end, with technology that revolutionizes medicine by making health care less expensive and less painful, and enabling medical professionals to target diseases for diagnosis and treatment, precisely and locally.




{kind=link}
Join the Discussion (0)
Become a Member or Sign In to Post a Comment