The way trees and plants grow is one of nature's wonders, but it's a process ripe for some serious interference from robots and artificial intelligence, according to a team of green-thumbed computer scientists in Europe.
To nature lovers this may sound like heresy, but the scientists, part of an European Union research project called Flora Robotica, believe that some robotic management could help ensure that plants and trees in public spaces grow in the shapes and sizes that communities want them to, rather than letting freeform foliage run rampant.
At July's ACM Genetic and Evolutionary Computation Conference (GECCO) in Kyoto, Japan, the Flora Robotica team will reveal how they plan to do this, and also how they harness a process similar to Darwinian natural selection to evolve artificially-intelligent control algorithms for their plant-guiding robots.
At issue is the fact that plants and trees can be an absolute nuisance when they grow in the wrong way, or in the wrong place. For instance, foliage can grow to block access to doors or gardens, or views from windows, and block streetlamps from illuminating sidewalks, too. In malls and city squares, municipal plants can easily grow out of control, as conventional means of constraining plants, such as trellises and arbors, can only do so much.
Overlong branches can injure people when they overhang roads, striking and damaging vehicles (and "overgrown trees" were among the causes of the 2003 Northeast Blackout, which affected 55 million people in the U.S. and Canada). In the U.K. today, some 13 million trees are being felled because they overhang railroad tracks (to prevent them dropping leaves that, when crushed to an oily paste, prevent trains from gaining traction, causing delays or worse).
Yet plants need no longer call the shots, says Heiko Hamann, professor of service robotics at the University of Lübeck in Germany, who specializes in self-organizing systems and swarm intelligence. Working with colleagues in Poland, Austria, and Denmark, Hamann is the coordinator of the Flora Robotica research program, which has received €3.6 million ($4.3 million) in funding from the EU.
The project's aim, explains Hamann, is "to steer the growth of natural plants with distributed robots" in a bid to make plants behave themselves in public spaces, and perhaps even morph them into useful outdoor forms, such as living park benches.
Hamann and his colleagues have developed a raft of robotically controlled ways to control plant growth. These measures include wrapping the stems and branches of trees, plants, and bushes in strong plastic tapes, called braids, some of which can be tightened by robotic actuators to physically constrain the directions that branches can grow in, operating like an intelligent, adaptive, three-dimensional trellis.
They also use LED lighting, set up to emit wavelengths that encourage photosynthesis; they place LEDs placed strategically, and/or move them via motion control rigs, to encourage plant growth in certain directions.
Another factor they deploy is vibration, which is known to inhibit growth in some plant species, as a stress response: placing a tiny electric motor with an eccentric weight on its spindle (like those used as buzzers in cellphones) on a plant stem can check its growth.
Plant growth hormones can also be applied in precision doses by the robotics, too.
"We're exploiting the natural behaviors of plants by triggering them to grow at the right moment, whether it is braids, light, vibrations, or growth factors we're using," says Hamann. As a result, "Any scale and any form of plant we want to grow is possible," he says.
In the case of the U.K.'s railroad-impacting tree problem, Hamann says, "Our idea for this scenario would be that our robotic elements in the trees detect the position of the tracks and apply a growth repellent at the correct position to stop growth of selected leaf-dropping branches. This could be done with growth-inhibiting hormones or vibration motors on the branches."
Flora Robotica's plans go beyond controlling plant size and branch growth directions, to steering growth to construct forms useful to people. "Steering the growth of natural plants automatically means our robots could grow, for instance, a hedge that doesn't need cutting, lumber that comes in the right shape without being cut, or maybe grow a park bench," says Hamann.
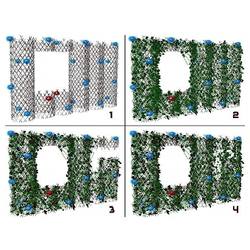
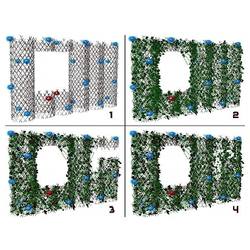
These are ambitious ideas they have yet to try, but over the next year the team plans to grow a hedge wall with a self-repairing clear window area left in it, without human intervention. When plant tendrils invade the window area, the robots will try to stop it with a self-repairing algorithm, says Hamann.
To accomplish this through automation requires accurate robot control algorithms, to adjust braid constraint actuators or LED motion systems, for example, to guide a plant's growth around obstacles, or away from restricted zones like the clear-window area.
To do that, the Flora Robotica team has to build a control system that understands how the plant they are using grows. That is why they first study a given subject species. They started with the common bean Phaseolus vulgaris, which they grew from a seedling, and used cameras to glean experimental data from the seedling's growth cycle in order to train a machine learning system (an artificial neural network) to create a computer model of how the plant grows naturally. The model assimilates many factors about the plant's climbing speed, its growth and winding behavior, and how its stem stiffens as it grows towards the light.
Having a model of how the plant moves is half the battle; the team then needs to know how best to control a pair of LEDs, one of which can be on at any one time (and which the plant grows towards) to guide a growing plant up and around an obstacle. They utilized an evolutionary algorithm that keeps changing the order of the parameters in a candidate solution until it finds the optimal answer; in this case, those parameters were the on/off patterns for the LEDs. As this 'survival of the fittest' approach mimics the way mutation and recombination of chromosomes occurs in biological genomes, it is regarded as akin to an evolutionary process.
The result? The evolutionary algorithm yielded an LED controller capable of fine-grained control of the LEDs, which guided the delicate bean seedling around a virtual obstacle (see it working in the video above).
The Flora Robotica team plans to apply this AI-based, evolutionary search technique to other plant species they are having good results with: climbers like ivy, grape vines, and wisteria, and with trees such as beech, hornbeam, willow, and eucalyptus.
While the project's main focus is currently on shaping plants for public spaces, a longer-term aim is to take advantage of AI plant models in the field of vertical farming, in which robotically rotated racks of hydroponically-grown, LED-lit crops are grown in urban buildings, as a way of increasing food production as the Earth's population swells to nine billion by 2050.
Hamann says the project has been welcomed by the public, "But we have been careful to not communicate our agenda as 'fusing nature and technology' as it may raise fears," he concedes.
To the American Society of Plant Biologists (ASPB) in Rockville, MD. "The Flora Robotica research is an exciting and important step in the journey toward more efficient utilization of the enormous resources plants have to offer," says spokesman Tyrone Spady.
Others are exploiting those resources technologically, too. In early June, at the ACM Symposium on Pervasive Displays in Munich, Germany, engineers from the University of Palermo, Italy, revealed how they are creating large displays that use plants as pixels. Using a species of mimosa shrub which closes its leaves when cool air currents play over them from an addressable matrix of pipes, they are working out how public signage with refresh times of six seconds can be constructed. They are currently wondering how to water their display, however.
At Autogrow, an Auckland, NZ-based company supplying automation for indoor crop growers, CTO Jeffrey Law welcomed Flora Robotica's multidisciplinary approach to plant shaping and its interesting use of machine learning-based plant modelling. Yet, Law cautions the project's computer scientists concerning a potential confounding factor gardeners know only too well: weeds.
"Weeds can virtually grow and thrive anywhere there's water. It doesn't matter what technologies humans have applied in weed control; they are nearly impossible to contain 100%," Law says.
Law says it is vital that Flora Robotica takes account of likely weed activity before making promises about how much it can manipulate plant growth. "Plants are the most unpredictable element in the whole equation."
Paul Marks is a technology journalist, writer, and editor based in London, U.K.

Join the Discussion (0)
Become a Member or Sign In to Post a Comment