People trapped in disaster-struck buildings could one day be saved by the most unlikely of rescuers: swarms of aerial robots that connect together to assemble rigid emergency rescue structures, like fire escapes and hovering platforms.
It sounds like the stuff of science fiction, and right now, it is. Yet delegates to the IEEE International Conference on Robotics and Automation (ICRA 2018) in Brisbane, Australia this week will hear how the first technological building blocks for just such an invention have been developed.
The vision, put forward by the University of Pennsylvania (UPenn) General Robotics, Automation, Sensing & Perception (GRASP) Laboratory, is an enticing one.
Imagine a raging fire has broken out in a tall building, and office workers are trapped on the floors above the inferno. The rescue outlook would be grim if those people are beyond the reach of fire department ladders, and internal staircases and external fire escapes have collapsed. Neighboring buildings may be too far away for people to leap to from the roof of the burning building.
If the GRASP Lab's plans succeed, all would not be lost in this scenario; against the backdrop of fierce flames and billowing smoke, a dark, swarm-like form would appear, perhaps from a truck at street level, looking for all the world like a spectacular murmuration of starlings. They would not be birds, though, but drones; hundreds of them. Under the control of first responders, this swirling swarm would rise up the side of the stricken building and split into three separate formations, with the drones in each flight docking together in mid-air to form different three-dimensional shapes.
One formation of drones could create a flat, bridge-like rescue structure that flies up to the roof, allowing people to walk across it to the next building; another could form a fire-escape staircase, while the third could form a hovering platform that could visit windows where people evacuating the building could be ferried to the ground.
This vision hails from a team led by Vijay Kumar, Bruno Gabrich, and David Saldana at UPenn's GRASP Lab, where much of the robotics research is inspired by biology and the natural world.
The self-assembling drone structures idea was inspired by South American fire ants, Solenopsis Invicta, which cooperatively build 'living bridges' by linking their bodies together, allowing their colonies to cross chasms in their foraging for food. The GRASP Lab team wondered if a simple repeatable structure comprised not of ants, but of dockable robotic aerial vehicles, could similarly create bridges from building to building and help in fire rescue scenarios. Indeed, could that repeatable structure make other shapes, too, and do much more than bridging?
"In a burning building, the individual [drone] modules can rapidly navigate through cluttered environments from a base station to the target building. They can then assemble bridges, external staircases, or platforms near windows to offer alternative exits," the team proposed in the paper they will present at ICRA 2018.
However, attempting mid-air drone docking for the purpose of saving lives presents a major computational and control systems problem completely unlike the mass drone light display swarms organized by the likes of Intel to open major events like the Consumer Electronic Show in Las Vegas, and the recent Winter Olympics in South Korea. In such light displays, drones have to maintain a 1.5-meter clearance from each other, in a collision avoidance bubble. To connect and make useful 3D shapes, the drones must "collide" (albeit gently) by approaching each other at the right speed, altitude, and attitude (the direction in which it points in three dimensions) so they can dock safely, and also cope with wind gusts on the very-differently-shaped, heavier vehicle they create when connected.
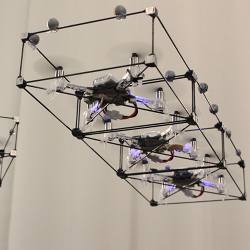
Kumar's team designed a flying modular structure comprised of dockable quadrotor drones, an architecture they have called ModQuad. Each element of the structure is comprised of a small quadrotor drone housed in a rectangular carbon fiber frame with a high-field-strength magnetic docking latch on each corner.
The researchers also had to develop an avionics control system that is distributed amongst the drones that can undertake the necessary altitude and attitude matching, as well as the docking, and coping with the sudden weight stress of the heavier structures that are formed when drones connect. "The key challenge here was to assemble a specified structure using only local rules—a decentralized controller—so that the complexity does not grow with the number of modules," says Kumar.
In its video, the team demonstrates accurate midair docking, creating three two-drone structures that then dock to form a six-vehicle platform. The researchers see this as a first step towards the adaptive swarming that applications like the emergency services application they propose will need.
Getting this far was not easy, says Kumar. "The vehicles have to reliably control relative positions, and docking forces, whilst being buffeted by the downwash from adjacent rotorcraft," he says.
"And when a vehicle docks to another vehicle, the dynamic characteristics of both vehicles change. For example, the effective mass doubles; it is like having someone jump into your arms. So each vehicle instinctively recoils while reacting and adapting to the changes that now make a square, four-rotor vehicle a more complex, rectangular, eight-rotor vehicle."
That means the control software has to act fast. "The key is to sense disturbances using onboard and offboard sensors, for example when the orientation is disturbed because of aerodynamic forces, and react quickly," says Kumar.
Despite it being early days—the technology works with tiny drones and can self-assemble but not yet disassemble, for instance—the GRASP Lab's ModQuad system has received its share of plaudits.
"The problem is very challenging, and the proposed solution very original. It greatly advances the capabilities of flying swarms," says Daniela Rus, director of the Computer Science and Artificial Intelligence Lab at the Massachusetts Institute of Technology in Cambridge. "This research on flying self-assembling structures will bring flexibility to aerial operations. The swarm will be able to adapt and create structures on demand, according to what the task and situation needs."
Heiko Hamann of the University of Lubeck in Germany, who specializes in swarm robotics and self-organised construction, is also impressed. "This work by Vijay Kumar's group is stunning and very interesting. It is a great idea that may really save peoples' lives some day," he says.
At the Wyss Institute for Biologically Inspired Engineering at Harvard University in Massachusetts, emergent systems researcher Justin Werfel, who has developed robots that build structures like termites, says the research is "a nice demonstration of self-assembly in the extremely challenging context of aerial robots."
However, Werfel has concerns about the usefulness of an analogy with ants in the GRASP Lab's application. "Ants building bridges can afford to make mistakes; slipping isn't a big deal if it means you just need to make up a little lost ground. But the airborne setting is particularly unforgiving: if one flying robot does something wrong, it can knock the whole thing out of the sky."
For its part, the GRASP Lab is now moving to the next stage: outdoor operations, in wind and weather. "Our goal is to scale up to more complex, self-contained robots. This will allow us to take the swarm outdoors into more interesting environments without the motion capture sensors we used indoors," says Kumar.
Interest in the self-assembling drone work is broad, and funding for the project is being provided by the U.S. National Science Foundation, the U.S. Defense Department's Defense Advanced Research Projects Agency (DARPA), the Office of Naval Research, and the U.S. Army Research Lab.
Paul Marks is a technology journalist, writer, and editor based in London, U.K.


Join the Discussion (0)
Become a Member or Sign In to Post a Comment