
Q: I would like my children to meet robots so they can understand and appreciate new technologies. Is there an appropriate venue?
– Reader of my blog on Japan Robot Week
Miraikan – Introduction: The Create your Future exhibit at Japan’s National Museum of Future Science (Nihon Kagaku Miraikan 日本未来館, nicknamed Miraikan) traces the development of modern Japanese robotics and challenges visitors to ponder how they would like to live in harmony with new technologies (video). Just as our move from landline to cell phones took place in a short period, we will be living robots in the home and workplace within the next decade.
Exhibits at Miraikan demonstrate the evolution of technologies for a wide range of topics, including: space exploration, disaster research, DNA sequencing, quantum computing, the Internet, and global warming. When President Obama visited Miraikan this past spring, he echoed the goals of the museum: “It’s important when … we think about how technology has allowed us to understand the planet that we share, and to understand not only the great possibilities but also the challenges and dangers … ” – whitehouse.gov (video)


For many foreign visitors, the main atraction of Miraikan is the collection of famous modern robots, each of which represents a historical milestone.
Halluc II – vehicular robot: The first demo I saw was Halluc II, a 20kg, spider-like robot with eight, multi-jointed legs (video) conceived at Chiba Institute of Technology. Halluc II uses robotics and automobile technologies to run, crawl and walk forwards, backwards and sideways in rough and unpredictable terrains. It is relies on smart technologies to walk up and down stairs (up to 12 cm in height) on its own using laser and infrared sensors to detect stairs ann obstacles and to monitor road surface conditions. The leg modules are connected via a small computer network to enable coordination of movements. Fleets of Halluc II have been deployed in Fukushima, equipped with wireless LAN capabilities, cameras and scientific instruments to measure radioactivity and hazardous chemicals.


Paro – therapeutic robot: One of the do-it-yourself demos was a stuffed toy shaped like a baby harp seal named Paro (video) by Japan’s National Institute of Advanced Industrial Science and Technology (AIST). It is one of earliest examples of a class of robots designed for emotional care of the elderly whose role is similar to animal-assisted therapy. Studies by Wada and Shibata on Palro’s success in improving the well-being of seniors was cited when the Japanese government announced the allocation of ¥2.39 billion (over USD$20 million) in 2013 for development of nursing care robot equipment.
96 Normal 0 10 pt 0 2 false false false EN-US JA X-NONE $([{£¥‘“〈《「『【〔$([{「£¥ !%),.:;?]}¢°’”‰′″℃、。々〉》」』】〕゛゜ゝゞ・ヽヾ!%),.:;?]}。」、・゙゚¢
InterRobot – non-verbal gesturing robots: Another do-it-yourself demo was InterRobot, a group of small, elf-like robots developed jointly by Hiroki Ogawa at InterRobot Co and Tomio Watanabe at Okayama Prefectural University. The robots react to human speech by mimicking non-verbal behaviors typically exhibited by humans during face-to-face communication, e.g., nodding and gestures demonstrating empathy. Visitors speak to InterRobot via a microphone in their own native tongue; the technology is language independent. I talked to InterRobot in both Japanese and English, and the reactions were similar. However, a thumping sound from sudden, synchronized response was strange since groups of people do not suddenly start and stop movements in unison in response to a speaker. Use of randomization algorithms to assign different durations, type and forcefulness of reactions to each elf would make their reactions seem more realistic.


Asimo – humanoid: Unquestionably, the superstar of Miraikan is the happy and perky Asimo. Honda’s humanoid (a robot with a body shape built to resemble that of humans) became an overnight media sensation well over a decade ago. Even today, audiences are awed by Asimo’s ability to: bow correctly and greet people; walk, jog and run; do knee bends; and sing while making various child-like poses. All of the feats are performed while maintaining an excellent sense of natural balance, which was the most difficult challenge for Honda engineers at the time of the robot’s development. Seeing Asimo perform live is a completely different and delightful experience than viewing a video; its/his charismatic personality shines through so successfully that even small schoolchildren sat quietly during the demo.
Unlike the interactive toys Nao and Robi Jr. (mentioned in my first blog), Asimo was purposely designed to be sufficiently tall to be an early prototype for a working robot. At 130 cm when standing, he is the height of a Japanese child old enough to perform tasks for people (e.g., turning light switches on and off), and short enough to be a playmate/babysitter for small children. The first version of Asimo did not have the intelligent capabilities (speech recognition, machine learning, sensory perception) typically found in today’s robots. However pre-programmed robots can put on a much more dazzling show than their intelligent counterparts, and I could not help but feel a pang of sadness as Asimo waved good-bye as he left for his little glass showcase at the end of his demo.
96 Normal 0 10 pt 0 2 false false false EN-US JA X-NONE $([{£¥‘“〈《「『【〔$([{「£¥ !%),.:;?]}¢°’”‰′″℃、。々〉》」』】〕゛゜ゝゞ・ヽヾ!%),.:;?]}。」、・゙゚¢
Recent versions of Asimo have improved capabilities and a lighter bodyweight, so movements – walking forward and backward, running (up to 9km/hour), going up and down stairs, hopping on one leg – can be carried out more rapidly and for extended periods of time. The hands have been remodeled with more joints to enable tasks that are simple for humans, such as opening a plastic bottle and pouring its contents into a paper cup. More significantly, on-board visual and auditory sensors and processors enable Asimo to recognize faces, human speech and voices, gestures, etc. catapulting the robot from the automated to the autonomous world.
Pepper – Asimo’s Rival: Success inevitably leads to competition. This year, Softbank announced plans to market Pepper, whose inventors un-apologetically market as a friendly, social robot: “Pepper is the first humanoid designed to live with humans. … he doesn’t clean, doesn’t cook and doesn’t have super powers … Pepper is a social robot able to coverse with you, recognize and react to your emotions, move and live autonomously. … (and) communicate with your through … voice, touch and emotions.“
Miraikan does not have Pepper (yet?), although the robot is quite famous. Like Asimo, many of features that make Pepper charismatic depend on sophisticated collaborative work by software and hardware engineers. Pepper has a 3D camera, ultrasound and processing system to enable safe navigation in homes and offices. It can understand human body language and speak to users in several languages, and its tactile sensors can sense and perceive different types of human touch to react appropriately. Although Pepper is marketed as just a toy friend, it can help with internet searches using the tablet computer screen embedded in its chest. The screen can also be used to display Pepper’s inner emotions. A nice, practical feature is the robot’s ability to detect low battery power and go to re-charge itself on its own. Interestingly, Pepper’s social skills landed him a job. Starting this holiday season, he will be selling Nescafe in Japan.
Pay-offs from Long-Term, Fundamental Research: Development of Asimo required long-term investment in basic research in engineering – a trend that seems to be on the wane among large corporations. The investment is paying off in unforeseen applications. In addition to extensive, free media coverage, Honda is using Asimo’s proprietary balance control technologies for commercial devices. Examples include: devices to assist people lift weakened legs and thighs as they walk, personal mobility devices similar to a segway with a seat, and devices to reduce stress on the legs of manual laborers. Visitors to Miraikan can sign up for a tour of the museum while riding UNI-CUB β, one of these devices.


Otonaroid & Kodomoroid – adult and child androids: My final stop was at this year’s new exhibit, Android: What is a human? from the Laboratory of Hiroshi Ishiguro of Osaka University and ATR. I was strangely drawn from afar towards the seemingly living and breathing Otonaroid, whose name is derived from the word otona 大人 (adult, in Japanese) and roid from android (robots that are purposely designed to resemble humans). I was completely unprepared for the android demo. I can only describe as repulsive and somewhat grotesque; videos and photos do not adequately capture the effects.
Otonaroid’s external features are made from making a mold from a real human being, which is then used to produce silicon-based flesh and skin for the robot. The android resembles humans more closely than sculptures in wax museums. The pasty, even-colored, white complexion is surreal, not unlike that of a corpse in a coffin. I found the not-quite subtle changes in Otonaroid’s facial expression even more eerie and similar to sedated hospital patients. Although the android’s facial expressions and gestures change when it speaks, (unlike InterRobot) it does not react to comments from the audience.
Until my visit to Miraikan, I had brushed off talk of the uncanny valley as a silly theory espoused by science fiction aficionados, but I was converted to a believer by my encounter with Otonaroid. The theory dates back to 1970 when Masahiro Mori, a robotics professor at Tokyo Institute of Technology proposed bukimi no tani gensho 象現谷の味気不 (the phenomenon of the valley of discomfor or eeriness) in a Japanese publication. Mori proposed that mechanical looking robots (e.g., assembly-line robots) evoke little emotional reaction, but as they develop cute and charismatic human-like features (e.g., like those found in Nao, Asimo, and Pepper), we develop a sense of affinity for them. At some point during the development of more realistic-looking androids, the human-like qualities become repulsive (e.g., Hand in the Adam’s Family, and Zombies in Michael Jackson’s Thriller). Mori believed that androids that are virtually indistinguishable from humans would eventually be developed and they would be attractive to humans, thereby pulling our emotions back up from the so-called uncanny valley, shown in the famous diagram from his seminal paper.
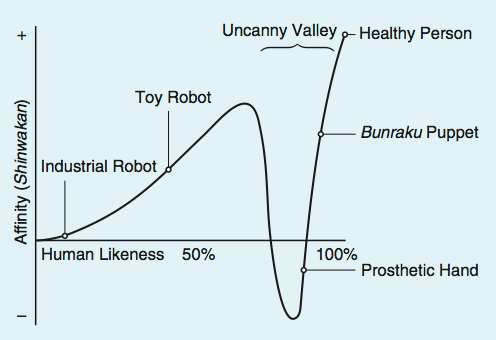
Figure from Masahiro Mori, The Uncanny Valley. Energy, 7(4) 33-35.
Several theories exist on the raison d’etre of the uncanny valley. One of the more credible asserts an evolutionary need for humans to be repulsed by corpse-like objects to prevent them from nearing and touching them lest they be contaminated with communicable diseases. Some scientists disagree with the shape of the curve in Mori’s paper and have proposed modified versions, while others dispute the existence of the uncanny valley altogether.
During Otonaroid’s demo, the robot referred to individual audience members and asked them provocative questions about their level of comfort with robots. Since robots will become members of households in the near future, what type of role would we want them to play? Answers included friend/playmate (by a child), house cleaner (by a young working male), and laborer for routine, manual work in offices and factories (by a middle-aged male). The demo operator appeared at the finale, and he asked all of us to ponder the questions and to submit out thoughts in the suggestion boxes next to exhibits in the museum.
We were directed to Kodomoroid, a child android, that sat well-poised, like a TV announcer reading the daily newspaper aloud. The voice was unmistakably that of a child. I was not revolted at all by the android, perhaps because the demo was not interactive and the eyes did not shift around. Ishiguro’s group found that adults tend to be more attentive to children’s voices, and children feel a kinship to child-like robots. Kodomoroid was conceived as an educational robot for children to help them learn about world events.
Conclusion: The tour of the robot section of Miraikan can be completed in a few hours. Although demos are not as flashy as those at Japan Robot Week, they are suitable for children and fulfill the goal of provoking substantive dialog on the impact of technology. After the demos, an audience member asked: “What type of robot would people feel comfortable living with? And are there cultural preferences?” When silence ensued, our guide followed up with: “How about a machine-like contraption like r2d2 from Star Wars? or a pet-like character or stuffed toy? or a humanoid like Asimo or Pepper?” Audience members were comfortable with the suggested choices.
Next, our guide asked about preferences for features for house robots. Most people seemed to agree with President Obama’s assessment of androids – at least Otonaroid: “We saw some truly amazing robots – although I have to say the robots were a little scary. They were too lifelike.” Legal questions included: who will be liable when an accident occurs involving a robot; whether we will be able to make our robotic twin; and what happens if robots become intelligent enough to go berserk on its own will. A provocative question related to taxidermy of family pets was: “Will people want to resurrect a family member in the form of an android?” The next question is yours.
Mori M (1970) The uncanny valley. Energy, 7(4) 33-35. English translation by MacDorman K, Kageki N, June 2012, IEEE Spectrum: http://spectrum.ieee.org/automaton/robotics/humanoids/the-uncanny-valley .
Ogawa H, Watanabe T (2001) InterRobot: speech-driven embodied interaction robot. Advanced Robotics, 15(3), 371-377.
Wada K, Shibata T (2007) Living with seal robots – its sociopsychological and physiological influences on elderly at a care house. IEEE Trans. on Robotics, 23(5) 972-980.
Mei Kobayashi holds a Ph.D. in Pure and Applied Mathematics; her research interests include computational chemistry, numerical analysis, signal processing, and data mining.



Join the Discussion (0)
Become a Member or Sign In to Post a Comment