In December, 16 robots engaged in spirited competition at Florida’s Miami Homestead Speedway as part of the trials of the DARPA Robotics Challenge (DRC) sponsored by the U.S. Defense Advanced Research Projects Agency (DARPA). At stake: a chance to compete in the finals for a $2-million prize.
The robots represented 13 different universities and research labs around the U.S., plus one each from Japan, Korea, Israel, and Hong Kong (with other countries partnering). The competitors were divided into two tracks: nine teams all built their own robots and programmed them, while the other seven worked with Atlas humanoid robots from Boston Dynamics and only did the programming.
The trials were designed to be representative of tasks a robot might be called upon to perform at the scene of a natural or manmade disaster. The human operators had to direct their robots through a series of tasks and obstacles, including driving a Polaris Ranger XP 900 utility vehicle through a course, then exiting the vehicle, climbing a ladder, and closing a series of valves. The organizers of the challenge made the tasks even more difficult by degrading communications between the operators and the robots, reducing the available bandwidth and introducing latency—again, a scenario characteristic of a disaster situation.
DARPA organizers were impressed with the results. “Teams did somewhat better in the DRC trials than we expected,” says Gill Pratt, program manager in DARPA’s Defense Sciences Office. “For the top half of the pack, hardware performed with almost zero breakdowns. Teams also performed better under communications degradation than we expected; for the top half of the pack, robots made substantial progress, even during the minutes when communications was degraded to 100kbit/s of latency and 500ms of latency. And entrants in the top quarter of the pack earned more than half of the total possible 32 points.”
The team from Japan represented SCHAFT, a company founded by two researchers (Junichi Urata and Yuto Nakanishi) from the JSK Robotics Laboratory of the University of Tokyo. The SCHAFT team, using a humanoid robot of its own design, won the competition handily, amassing 27 points—7 points more than the second-place robot from the Florida Institute for Human & Machine Cognition. “The Japanese team had a long history of very good academic work from the University of Tokyo and other laboratories on which to build,” says Pratt. “They also were extremely well-organized and did their hardware and software development early. Finally, they built a water-cooled electric robot with powerful actuators, which allowed their robot to generate a lot of torque without having to worry so much about overheating.”
Seth Teller of the Massachusetts Institute of Technology (MIT) team says the most difficult tasks for the robots were those involving a rapidly changing environment. For example, the test that required the robot to go through a door was conducted on a gusty day, with the door swinging back and forth. The robots performed less effectively when objects in the environment didn’t move “in a slow, predictable way,” says Teller.
Humanoids from MIT
The MIT team, headed up by Teller and Russ Tedrake of MIT’s Electrical Engineering & Computer Science department, came in fourth. The MIT team chose to work with the Boston Dynamics Atlas robot: “it was actually a pretty easy decision,” says Teller. “Russ Tedrake and I are much more software than hardware people. By going with that track, we reasoned that we would effectively have one of the world’s most capable hardware providers on our team.” The fact that MIT and Boston Dynamics are neighbors was a factor as well—Teller cites the quick response they were able to get whenever something broke on the robot.
Teller also sees advantages to using a bipedal robot for the kinds of tasks the Challenge presented. “(The robot) can stand up and have both hands free,” he says. “The world is made for people. You should have roughly human morphology to use all the tools and affordances and spaces that are out there in the world.”
“You should have roughly human morphology to use all the tools and affordances and spaces that are out there in the world.”
Teller and Tedrake’s approach to programming their robot was based on assisted perception and assisted planning: the operator views the world through the robot’s eyes and uses an interface, such as a touchscreen and stylus, to point out objects the robot can work on—a valve, a steering wheel, or a door handle, for example. The robot is equipped with a dictionary of objects to serve as templates, and can search through adjustable parameters to match the appropriate template to the real-world instance of an object. It also knows the degrees of freedom inherent in an object. “A valve has one degree of freedom,” explains Teller. “Once the robot knows it is a valve, when we say ‘turn the valve clockwise,’ the motion plan it has to generate is quite simple.” This approach allows the human operator to perform executive functions—deciding which door to enter, which way to turn after entering, and what to look for, for example—while the robot handles lower-level tasks of generating motion plans to perform those actions.
This approach provided the team a path to improving its robot’s performance. “Since December, we have significantly increased the autonomy level of the robot,” Teller says. Whereas during the trials, a task like picking up a drill required multiple separate commands to the robot—locate the drill, walk to the table, grab the drill—now they can include all those steps when issuing a single command like “find the drill and pick it up.” That increased autonomy should help the robot deal with degraded communications, especially if the DARPA organizers introduce actual network dropouts. Such dropouts would severely impact teams that relied on “puppeteering,” or real-time teleoperation, to steer and control their robots.
Simians from JPL
The ability to deal with interrupted communications is a strength of RoboSimian, the entry from the U.S. National Aeronautics and Space Administration (NASA) Jet Propulsion Laboratory (JPL). JPL built its own four-legged robot, drawing on its experience with robots. “We have a robot on Mars that needs to be very safe and very patient,” says Brett Kennedy, supervisor at JPL’s Robotic Vehicles and Manipulators Group. “It may only talk to its operators every now and again, and it is always going to be kind of out there on its own.” That philosophy guided the design of RoboSimian as well—it has the ability to come to a stable stop and await further instructions if it runs into a problem or completes its immediate goal.
RoboSimian’s stability is also appropriate for working in a disaster area. “We are always going to be a three-legged stool,” explains Kennedy. “The robot can come to a stop at any time and not fall over, as opposed to a bipedal mode where you have to be actively balancing yourself. If we need to get up to something on a wall, we can move up into a bipedal position, supporting ourselves on the wall. We always have three points of contact and are statically stable because of that.”
The Carnegie Mellon University (CMU) entry, called CHIMP (for CMU Highly Intelligent Mobile Platform robot), also featured a quadrupedal design, “but I think we were by far the furthest over on the humanoid vs. non-humanoid spectrum,” Kennedy says.
Kennedy acknowledges the advantages Teller cites in using a humanoidstyle robot, particularly the ability to carry something while still moving around a site, but the JPL team found another way to accomplish the same goal. “If you look at our simian cousins, they find ways to hold things in their hands and still walk on them,” Kennedy says. “We probably would have found ways to do that as well.” Instead, noting that almost all of the DRC challenges provided a flat floor, RoboSimian was designed with a set of wheels in addition to its four limbs, which enabled it to roll from one place to another while using its limbs to carry something.
Assessing Results
Kennedy and Teller agree one of the main reasons the team from SCHAFT did so well was it had much lengthier experience with their robot. “They are extremely talented roboticists,” says Kennedy, “there’s no two ways around that, but they came out of a lab that has been building humanoids for well over a decade at this point. They’ve been working on a problem set that is closer to what we did for the Challenge than any other team, for longer than anybody else. That makes a big difference in terms of performance.”
The DRC was announced in April 2012, and since SCHAFT was going to use its own system, “they had 20 months to work with their robot; we had four months,” says Teller. The Boston Dynamics robot is classified as a munition by the U.S. Department of Commerce, and MIT, like most universities, will not permit munitions on campus. “So we couldn’t accept delivery of the robot until August, after we resolved the bureaucracy around having it reclassified as a ‘sensitive device’ and not a munition.”
Teller does not discount the SCHAFT team’s technical excellence. “They had a nice physical platform that had powerful and very precise actuators, so they could position their effector exactly as they wanted to. They had a camera in the palm of their non-manipulating hand that they were using for a close-in view so they could see exactly what they were doing. That was something that was hard for us—something about the Atlas platform we weren’t entirely satisfied with was its visibility on the task. And they had a very skilled puppeteering operator who was using these precise motions very effectively.”
Still, Teller is confident about the MIT robot’s abilities in the finals. “I think we’re fairly well caught up at this point,” he says. If communications are cut at times during the tasks, he observes, that should reduce the advantage of the SCHAFT robot, which relies on real-time teleoperation.
The issue may be moot. Last year, Google acquired SCHAFT (as well as Boston Dynamics), and rumors suggest the company will withdraw its robot from the competition, preferring to focus on commercial robotics rather than seek funding from the military. The SCHAFT website has been taken down (except for a home page with no information), and Google did not respond to a request for comment. Still, according to DARPA’s Pratt, “We are not presently aware of any plans to withdraw.”
DARPA says the DRC Finals will be held sometime between December 2014 and June 2015.
Further Reading
Walter, M.R., Hemachandra, S., Homberg, B., Tellex, S., Teller, S.
Learning Semantic Maps from Natural Language Descriptions, Robotics: Science and Systems, June 2013, Berlin
Walter, M.R., Friedman, Y., Antone, M., Teller, S.
One-shot Visual Appearance Learning for Object Reacquisition, International Journal of Robotics Research (Special Issue on Robot Vision), vol. 31, no. 4, pp. 554-567, April 2012
DARPA YouTube channel, with videos of the Trials: https://www.youtube.com/user/DARPAtv
Figures
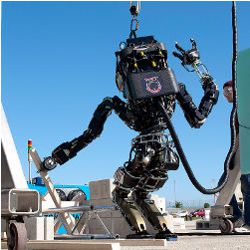
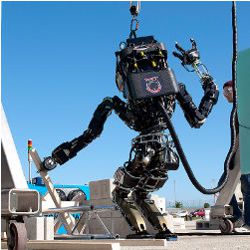
 Figure. Team SCHAFT’s humanoid robot navigates through debris in one of the DARPA Robotics Challenge’s disaster scenarios.
Figure. Team SCHAFT’s humanoid robot navigates through debris in one of the DARPA Robotics Challenge’s disaster scenarios.
 Figure. NASA JPL entry RoboSimian, alone (above) and with JPL Robotic Vehicles and Manipulators Group supervisor Brett Kennedy (left) and RoboSimian Integration lead Chuck Bergh.
Figure. NASA JPL entry RoboSimian, alone (above) and with JPL Robotic Vehicles and Manipulators Group supervisor Brett Kennedy (left) and RoboSimian Integration lead Chuck Bergh.
 Figure. The MIT team used assisted perception and assisted planning to program this Boston Dynamics Atlas robot, which achieved fourth place in the DARPA Robotic Challenge trials.
Figure. The MIT team used assisted perception and assisted planning to program this Boston Dynamics Atlas robot, which achieved fourth place in the DARPA Robotic Challenge trials.



{kind=link}
{kind=link}
{kind=link}
Join the Discussion (0)
Become a Member or Sign In to Post a Comment