Once upon a time (back in 2015), the U.S. Defense Advanced Research Project Agency (DARPA) enlisted real insects to do fly-on-the-wall surveillance, going so far as to implant electronics in insect pupae, which allowed their remote control after metamorphosis as flapping-wing hybrid-insect cyborgs in its Hybrid Insect Micro-Electro-Mechanical Systems (HI-MEMS) program.
While that program has been shut down, “There are a lot of reasons to suppose that using a real insect might be a good alternative to building our own robots,” said Sawyer Fuller, a professor in the Department of Mechanical Engineering at the University of Washington, Seattle.
“Insects are relatively easy to create; just feed them and give them the right environment, and they do the rest. They can store significantly more chemical energy than is possible with current battery technology, so they can fly for much longer too. I am waiting for them to show good repeatability in flight control.”
However, it appears the future of insect-sized remote-controlled aerial robots will be electromechanical rather than cyborg, according to Fuller and his colleagues, who demonstrated what they called the world’s first untethered flapping-wing aerial robot at the International Conference on Robotics and Automation (ICRA 2018) in Brisbane, Australia, in May.
Said independent observer Guido de Croon, assistant professor at the Delft University of Technology’s Micro Air Vehicle Lab, “This is the first time we have seen the take-off of a truly free-flying fly-sized robot. Fuller’s work tackles some of the most significant challenges on the road to bring these robotic flies to the real world.”
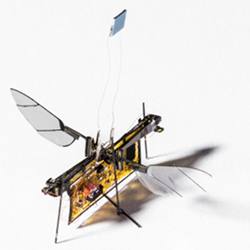
The robot created by Fuller and his colleagues, the RoboFly, can hover using power beamed to it by an infrared laser invisible to the naked eye. Since RoboFly is not funded by the U.S. Defense Department, it is being envisioned for a variety of civilian applications, such as detecting gas leaks in walls or pipe-filled chemical plants, performing crop surveys for farmers, and other feats impossible for today’s much larger drones.
“The new thing here,” said Fuller, “is that this is the first little flying insect-sized robot that has no need for a wire coming up from the ground to supply power and control signals. Its predecessors first demonstrated the ability to take off using wings more than 10 years ago, but until now, all demonstrations required this little wire, which hinders their ability to go long distances.”
The original development of insect-sized flapping-wing aerial robots was done by Ron Fearing at the University of California more than 15 years ago. One of Fearing’s doctoral students, Rob Wood, now a professor at Harvard University, demonstrated how an insect-sized flying robot’s lifting power could exceed its own weight. Later, in 2013, Fuller and Wood collaborated to demonstrate free flight for a robotic insect, but it took five more years for Fuller and colleagues, including doctoral candidates Johannes James and Yogesh Chukewad, to cut the cord and demonstrate RoboFly’s ability to lift off without a wire tethering it to a power supply or controller.
That feat was achieved by incorporating in the RoboFly a line-of-sight laser whose energy is converted into electricity on-board the robot to power its piezoelectric actuated wings. More specifically, the 190-milligram RoboFly receives power from a 976-nanometer-wavelength laser through a photovoltaic cell producing seven volts. A voltage booster circuit then produces the over-200 volts required by the piezoelectric wing actuators, while a microcontroller provides feedback to vary the flapping speed at a speed of up to 170 cycles per second (Hz).
To keep the tiny robot’s weight down, the researchers devised a novel ultra-lightweight circuit fabrication technique, which requires no chemical etching as is used in conventional printed-circuit boards (PCBs). After applying a low-tack adhesive to a sheet of 25-micron-thick copper foil, a 20-micron spot from a diode-pumped solid-state laser micro-machines the actuators and body of the insect robot. After peeling off the excess copper and applying a flexible Kapton substrate, the resulting circuit board is just 50 microns thick, weighing approximately six milligrams per square centimeter. Circuit components are then installed using standard soldering techniques, with the microcontroller installed on the backside using vias. The setup supplies 250 milliwatts of power to the flapping wings' piezo-electric actuators.
No battery technologies today are light enough to equal the laser-powered technique, but Fuller’s team is working to use solid-state batteries to power the RoboFly when it strays out of sight of the laser.
“We are very interested in tracking lasers, because they would be capable of supplying significant power over long distances. For example, my co-author professor Shyam Gollakota [at the University of Washington’s Networks and Systems Lab] has already shown that lasers can charge a cell hone from across the room and at a reasonable rate,” said Fuller.
The team is also experimenting with lightweight radio-frequency (RF) energy harvesters that could continuously power the flying robot without requiring line-of-sight lasers.
R. Colin Johnson is a Kyoto Prize Fellow who has worked as a technology journalist for two decades.



Join the Discussion (0)
Become a Member or Sign In to Post a Comment